This article has been published and is reproduced here by permission. J P Hare, Physics. Education, 47 (2012) 409-417.
for a free download from the IOP web site go to: Longboard Speedometer
Up-dates, modifications and alternative techniques
magnetic detection technique
Here is an alternative wheel rotation detection system that uses a Hall effect magnetic switch and rotating magnet instead of IR emitter, detector and mirror.
Possible problems with the IR set-up
The IR detection system relies part on the out-of-spec. properties of the IR detector.
The part I used is now no longer being produced but it is still currently available from suppliers.
Eventually though it may be hard to obtain and I cant vouch for the effectiveness of other (similar or replacement) devices.
Further to this the IR transmitter is fixed to the board while the reflecting mirror is fitted to the wheel that may well be steering about a bit.
I therefore wanted an alternative method that would not be effected by wheel and truck movement.
Its also fun to try another detection technique and get similar data in a different way.


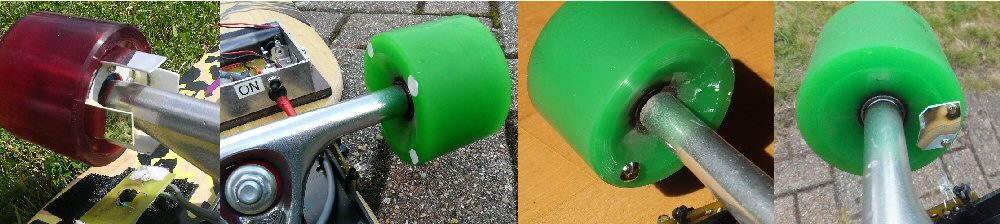
Left: the Hall effect magnetic sensing system. The magnet is fixed to the wheels and rotates into position once every rotation.
The magnetic field sensor (small black device) is mounted on the truck so that it is close to the rotating magnet as it passes by. Right: the original
IR detection system.
As we have discussed above; IR light from an IR LED reflects off a mirror that is in position once every rotation. The reflected light falls onto an IR detector.
Each technique produces pulses that can be signal processed and averaged to produce a voltage proportional to speed.
Here we use a magnet attached to the wheel instead of a mirror.
As the magnet rotates it triggers a magnetic Hall Effect switch (A3144) to provide the rotational speed pulses.
The circuit uses a cheap and effective solid state Hall effect magnetic switch (although a delicate glass read switch might work for low speeds).
This replaces the circuitry associated with the first 555 timer and the IR detector chip.
The pulses from this device go into the second 555 in an identical way to the IR set up.
So this technique has a lower component count and takes less power that the original IR system.
An advantage of the magnetic system is that the magnetic switch / detector can be fitted to the truck cross bar near to the side of one of
the wheels and thus all the detector apparatus follows the movement of the wheel exactly; whatever manoeuvre takes place.
Circuit of the magnetic detection system. The signal from the Hall effect magnetic switch replaces the IR detector and from then on the circuit
is the same as the IR circuit. I have incorporated a 'marker' switch that can be used to create 6V pulses.
This is useful when out-and-about to highlight special interest parts of the trip, these pulses are helpful to identify this data later on once the data has been downloaded.
Magnetic detection component Listing
Resistors
1 x 10k, 68k, 100k
2 x 4k7
Capacitors
1 x 0.01uF, 0.22uF
3 x 0.1uF
2 x 1nF
1 x 100uF 16V
Semiconductors
1 x NE555 timer chips
1 x Hall Effect switch type A3144 (e-bay etc)
2 x 1N4148 silicon diodes
Misc.
1 x metal box (120 x 95 x 34 mm, e.g. Maplins N90BQ)
1 x ON/OFF switch
1 x push switch or sprung toggle switch for 'marker' pulse
1 or 2 small rare earth magnets (with central hole)
1 x small self tap screw
cable grommet
20 cm of 3 way cable for sensor
data logger (to fit box)
I also gave the metal box a couple coats of varnish to protect from the weather.
Other modifications and additions
In this version of the speedometer I have also included a push toggle switch that supplies a 6V marker signal (full battery voltage) to the logger.
In the IR version I suggested leaving 'zero' signals (e.g. by delibrately not moving for a while) to try and highlight or 'isolate' periods of
activity so that they can easily be tracked down later on when the data is analysed.
However it was still quite difficult to unambiguisly identify spacific data as you can get quite a few 'zero' signals on a trip and its just not
practical to keep stoping and noteing down the time of some particular part of the route or trick.
The 'marker' switch produces 6V signals which stand out very clearly when you analyse the data.
For example, lets say the logger has been set-up to record 9 hours of data and you have been out and about recording a lot.
You now want to highlight one stretch of a run for particular analysis / investigation later -
how do you make sure you can locate this with so much recorded data?
What you do is press the 'marker' button for a few secnds at the start, and at the end of the special run to 'top and tail' the data.
These 'marker' signals are much larger voltages than normally recorded so are much more obvious on the data than say a simple 'zero' signal
(which actually might occur quite often as you start and stop on the board).
Once the data has been downloaded you will clearly be able to see this 'special' data incorporated within these peaks (e.g. see '1 mile data' below).

Photo under the longboard showing the electronics before the protective cover has been fitted.
You can see the four AA batteries and the circuit board.
The right hand switch is ON / OFF while the left is a sprung toggle that can be pressed to produce the'marker' signal useful to 'label' data during recording.
The long cylindrical device is the data logger.
Apparatus description
All the electronics fits very neatly into a small dicast box.
As I had a bit more room due to the smaller component count I decided to use 4 AA batteries for power longevity.
AA lithium batteries would provide power for even longer and are lighter.
I used the same type and size of box for the electronics as I used in the IR system as I found this worked really well over the last year in all sorts of conditions.
I glued a piece of 1cm thick foam to the inside of the lid to keep the batteries in place while we rattle and roll along.
I also put a tight elastic band around the logger so that the logger connector was held tight.
The ON/OFF switch can be seen on the right, while the left hand switch is the marker switch.
This looks like a normal toggle switch but is in fact a sprung toggle (it switches back when released) that has to be held down to create a marker on the logged data.
I found it was possible to operate this switch with one hand by bending down while skating along.
The Hall effect magnetic detectors come in various forms and part numbers with a range of sensitivities.
I found the A3144 device very cheaply on e-bay but others will no doubt work with some experimentation (e.g. 3141, 3142, 3134, 3213).
Note: my detector only triggers with the correct face (field strength direction) of the magnet passing by. (The 3213 will respond to either a N or S pole).
At the top of this section is a close-up of the Hall effect device (small black square) near to the magnet(s) fixed to the wheel.
Also shown is the original IR set-up for comparison. This picture was taken before I covered the device in water proofing gel and shrink wrap (see below).
The hall effect device and wiring was held to the truck with tape.
I will up-date this page if I find a better way of attaching this (tape works pretty well even if it does not look very professional).
I used two small rare earth magnets (ca. 8mm diameter x 4 mm long each with a central hole) which I simply screwed into the side of the wheel (drill with a 1.5 - 2mm bit first) using a
small self tapping screw. Note: screwing into the wheel may seem rather extreme but in practice Polyurethane is tough enough
(see notes about attaching the mirror to the wheel above).

Photo showing the hall effect device covered in a protective shrink-wrap.
I also used a glue gun to produce a plastic 'corner' to strengthen the bent wires of the device so that it would stay in position.
Note: this photo was taken when the board was up-side-down so that the actual position of the detector in normal use is above the truck,
well away from the road surface and so less likely to be knocked.
Results
To highlight what the equipment can do I have recoded some data on a relatively straight forward run along a coastal prominade path.
Of course the equipment could be used on much more challenging routes. The data was downloaded from the logger when I got back home.
I happened to use Orangatang Durian wheels in these tests. They are about same size as the Gumballs which I used in the IR tests so
the scale factor should be the same - this is supported by the results (see '1 mile data' below).
The data was exported to EXCEL and then each data point was simply multiplied by K = 4.5 to get it into mph
(see calibration details in the main IR article above). The mph v time (seconds from start) data is for a run along the coast from Goring-by-sea to Shoreham
(West Sussex, UK) which was about 7 to 8 miles.
The first thing I noticed was how close the magnetic sensing data was to the IR data results which was gratifying.
On this design I included marker signals when the second button was pressed and these really do help identifying where the data corresponds to in terms of location.
The part from 100 to 600 seconds into the trip shows the speed and progress negotiating the roads from Sea lane Goring to the start of the
prominade run along the coast. There is a lot of pavement and road crossing going on so its difficult to get up a decent speed.
From 600 to 650 the signal almost goes to zero. This was where I had to stop and pick up the board to cross the main road onto the prominade.
The signal did not go to zero, even though I was not skating because the wheels were spinning freely in their bearings while the board was being carried.
From 650 to 1600 seconds I race along the coastal path into Worthing, past the pier.
The path now follows the coastal road and is not so wide and pleasent a route.
The path continues to the Brooklands junction where I stop and use the 'marker' switch.
From 1600 to about 2000 seconds I follow the pavement around onto the sea front green at Lancing.
The route is a corregated concrete path which is harder going than the tarmac paths so far skated.
As a result the speed profile is more varied here.
From 2000 seconds the path goes past the lagoons west of Shoreham which I have descibed in detail below.
The eight miles of the route took about 40 to 45 mins which means I was travelling at about 10 mph so the data looks about right.
Speed data (mph) v time (seconds from start) from Goring-by-sea to Shoreham about 7 to 8 miles.
The run from Goring to the junction at Brooklands (East of Worthing) is to the left of the first marker signal
(large off-scale signal lines). The data between the last two marker signals is the 1 mile run along a smooth long track (see text below).
Note: If you get off and carry the board you sometimes dont get zero signals. This is because the wheels often keep spinning for a while.
see text for more details of the data.

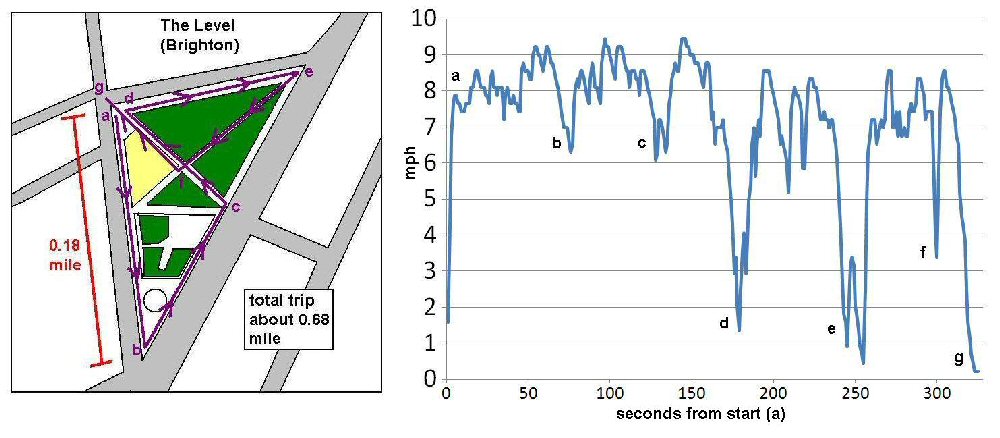
Looking down part of the nice smooth path near the Shoreham Widewater lagoon.
This is a great place to do some basic speed tests, the route being about 1 mile long.
The lagoon is to the left while the sea is on the right.
Speed data (mph) v time (seconds from start).
The data from about 2000 to 2400 seconds into the journey between the two marker signals (off scale signals) corresponds to a part of the route that was
a nice smooth, slightly downhill path (Widewater lagoon). This is good place to get up a steady speed. The speed was obtained simply by multiplying the voltage data by 4.5
(the K value for the IR set-up, see main article above). This part of the trip is about 1 mile long so is very useful for rough calibration.
It took 5 mins (300 seconds) to run the mile which therefore an average speed of about 60 / 5 = 12mph.
This is close to what we see from the scalled data logger results.
The data between about 2000 and 2400 seconds into the trip is the part from the end of Lancing Green to the start of the road into Shoreham.
This is a very smooth, slightly downhill path that is easy to keep a good speed along.
The route is so steady that I could crouch down on the board while moving and press the 'marker' button to mark the start of this part of the journey.
According to the map this is about 1 mile long.
As the journey took 5 mins this corresponds to 1 x 60 / 5 = 12 mph which matches quite well with the scaled data on the plot.
You can see from the peaks on this plot that I pushed / skated on the board about 20 times (20 peaks: a push every 15 secs or so) to cover the mile.
I then let the board slow down and stopped off for a break and then pressed the marker button to mark the end of this part of the run.
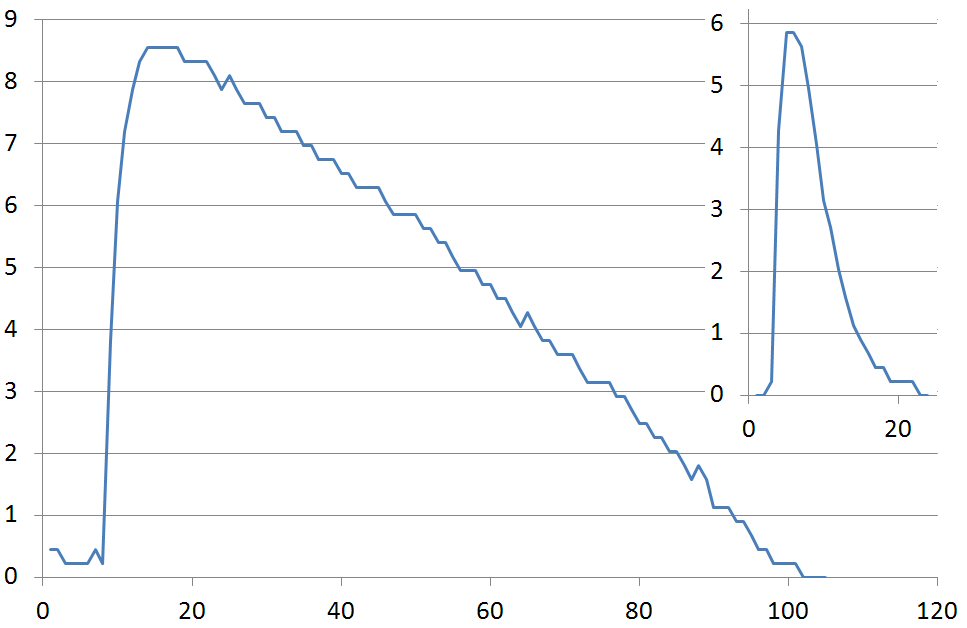
The spin speed (mph equivalent) over time (seconds) of a wheel being spun in air (spinning on its bearing fixed to the truck). The main plot is with new Bones Reds bearings which come with a thin layer of fine oil. The Inset is the same bearings filled with bike grease. The idea of filling with grease is to provide protection from water ingress and also to try and make them less noisy when out and about. Although the grease filled bearings obviously slow down much more quickly when spun in the air, once we are out on the board with our weight (momentum = mass x velocity) this does not slow us down too much. I feel its worth the long term improvement and improved noise reduction.
The data above is the result of adding bike grease to some new bearings. I did this to reduce the noise from the bearings and most importantly to try and minimise water ingress. I found that the new Bones Reds bearings were very good and smooth but were very noisy even on quite a smooth path. The data above shows the way the wheels spin in their bearings when they are simply spun in air (on the truck). For new bearings (which have a very thin layer of fine oil) you can see that wheels spun for 100 seconds or so. When grease is added to the bearings we can see that they do not spin for so long in the air. However once we get on the board our mass (momentum) soon overcomes this friction. Of course you are lossing energy with the thicker grease but the improvement in noise and in keeping water out from the bearings is worth the while.
IR detection
pros: plastic mirror very light weight and cheap. Initial alignment / set-up easy.
cons: may not cope well with very tight bends / steering where the mirror may go out of alignment.
Need to keep mirror relatively clean.
Spinning magnet detection
pros: good alignment what ever position trucks take, small component count and lower power than IR set-up.
cons: roads often contain iron 'litter': nails, screws and cleaner brushes, so magnets pick up detritus.
Need to be careful about magnet position on different size wheels.
Dr Jonathan Hare, E-mail: jphcreativescience@gmail.com
NOTE: Although none of the experiments shown in this site represent a great hazard, neither the Creative Science Centre,
Jonathan Hare nor The University of Sussex can take responsiblity for your own experiments based on these web pages.
THE CREATIVE SCIENCE CENTRE
home | diary | whats on | CSC summary | latest news